Drehstrom Motor an 3 Phasen
Drehstrom Motor an 1 Phase
Drehrichtung
Leistungsangabe
Leistungsaufnahme aus Spannung und Strom berechnen
Leistungsaufnahme aus Wirkungsgrad und Leistungsabgabe berechnen
Betriebsarten
Gleichstrom Motor
Drehstrom Motor
Reihenchluss Motor
Wirkungsgrad n (Eta)
Leistungsfaktor Cos phi φ
Motor Temperatur
Motorschutz
Motorprüfung
 Ein Kondensator Motor ist konzipiert um an Wechselspannung betrieben zu werden.
Ein Kondensator Motor ist konzipiert um an Wechselspannung betrieben zu werden.Der Stator , also der feststehende Teil des Motors beinhaltet zwei um 90° versetzte
Wicklungen unterschiedlicher Größe .
Ein Betriebs Kondensator bewirkt das die Hilfswicklung eine um 90° versetzte Spannung zur
Hauptwicklung erhält um so ein Drehfeld zu erzeugen.
Kondensatormotoren haben immer einen gewissen Schlupf was bedeutet das ihr magnetisches
Drehfeld immer dem elektrischen Drehfeld etwa hinterher läuft.
Damit ist ihre Drehzahl immer etwas kleiner als ihr aus Polpaar und Frequenz berechnete Drehzahl.
Durch die improvisierte Hilfswicklung ist das Drehfeld natürlich nicht ganz Rund sondern
eher ellipsenförmig.
Die Folge ist ein relativ schwaches Anlaufdrehmoment.
Dabei wird eine Wicklung (Hauptwicklung) direkt an die Wechselspannung der Betriebsspannung angeschlossen,
und die zweite Wicklung (Hilfswicklung) wird über einen Betriebs Kondensator an die Betriebsspannung angeschlossen.
Um das Anlaufdrehmoment zu erhöhen kann ein zusätzlicher Anlauf Kondensator (C2) dienen, der aber nach dem Anlauf wieder
außer Betrieb genommen werden muss weil der Motor sonst überhitzt.
So kann man dafür sorgen das der zusätzliche Anlauf Kondensator zum Beispiel nach dem anlaufen über einen Fliehkraftschalter
oder ein Zeitrelais deaktiviert wird.
Die Kapazität des Betriebs Kondensator C1 lässt sich ohne Berechnung in etwa
folgendermaßen bestimmen.
Pro KW Motorleistung sollte die Kapazität zwischen 30 und 40 uF liegen.
Der Anlauf Kondensator C2 sollte das dreifache des Betriebskondensator haben.
Z1 und Z2 gekennzeichnet wird.
Um die Drehrichtung zu ändern muss die Hilfswicklung Z1 <====> Z2 umgepolt werden.
 Drehstrom
Motoren haben ein Klemmbrett bzw. eine Anschlussdose an deren
Drehstrom
Motoren haben ein Klemmbrett bzw. eine Anschlussdose an derenAnschlüsse die innen liegenden Wicklungen nach folgenden Muster angeschlossen sind.
Die erste Wicklung hat die Bezeichnung U1 und U2 , die zweite Wicklung V1 und V2
und die dritte Wicklung trägt die Bezeichnung W1 und W2.
Mit diesen Bezeichnungen sind alle Anfänge und Enden der Wicklungen auf dem
Klemmbrett angeschlossen und in der Regel auch bezeichnet.
Nun hat man die Möglichkeiten die Wicklungen je nach vorhandener Spannung oder
benötigter Leistung durch aufschraubbare Brücken nach seinen Bedürfnissen zu verdrahten.
 Es gibt in der Regel 2 Möglichkeiten diese Brücken zu setzen , einmal als Stern und einmal
Es gibt in der Regel 2 Möglichkeiten diese Brücken zu setzen , einmal als Stern und einmalals Dreieck.
Als Beispiel zuerst die Möglichkeiten die Wicklungen als Dreieck an zu schließen.
Der Vorteil der Dreieckschaltung liegt darin das jeder dieser drei Wicklung die komplette
Spannung des Drehstromnetzes bekommt.
Also in Deutschland in der Regel 400 Volt.
Dadurch hat der Motor im Verhältnis zur Sternschaltung eine um 1/3 höhere Leistung .
Jetzt liegen die 400 Volt aber an jeweils 2 Wicklungen an , und die Spannung teilt sich deshalb auf diese 2 Wicklungen auf.
Die Spannung teilt sich aber nicht gleichmäßig in 2 Teile auf sondern durch die Phasenverschiebung der 2 anliegenden Phasen
teilt sich die Spannung in 400V / Wurzel aus 3
Damit liegt an jeder Spule eine Spannung von 400V / 1,73 =231 Volt an.
Damit bekommt jeder einzelne Wicklung jetzt weniger Spannung und entwickelt dementsprechend auch weniger Leistung.
Die aus zu wählende Varianten mit der man den Motor nun anschließt ergibt sich aus der sich angebotenen vorhandenen
Spannung und aus den auf dem Typenschild angegebenen Leistungsdaten.
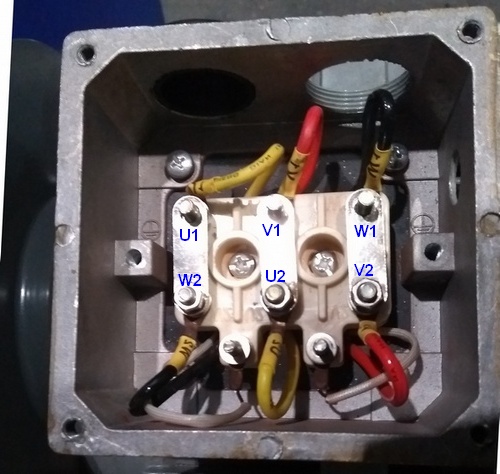 Klemmanschluss eines Motor deren Brücken
Klemmanschluss eines Motor deren Brückeneinen Anschluss im Dreieck
abbilden.
Ein Motor nimmt bei gleicher Spannung im Dreieck ca.1,7 mal mehr Leistung als in Stern auf.
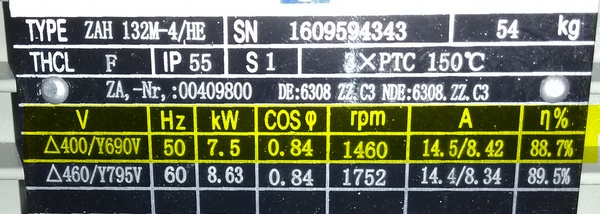 Hier ein Original Typenschild eines Drehstrom Motor.
Hier ein Original Typenschild eines Drehstrom Motor.Es befinden sich darauf in zwei Zeilen, Angaben der
Anschluss Werte.
Die relevante Zeile ist die mit der Angabe 50 Hz , weil
die mit 60 Hz nur in Ländern wie zum Beispiel in
England von Bedeutung ist.
Die erste Spalte nun gibt die Spannung an mit welcher
der Motor betrieben werden kann.
Bedeutet also 400 Volt Dreieck oder 690V im Stern.
In Europa steht uns in der Regel die Spannung 230V
oder 400 Volt zuVerfügung.
Also können wir nur die 400 Volt variante im Dreieck benutzen.
Weiterhin zeigt das Typenschild eine Leistung von 7,5 kW an.
Aber Achtung !
Dies ist die Angabe der vom Motor abgegebenen mechanischen Leistung , nicht wie oft angenommen die elektrische Leistungsaufnahme.
Aber es gibt Ausnahmen, bei sehr kleinen Motoren zum Beispiel in Hand betriebenen Maschinen wie zum Beispiel Mixer,
Handbohrmaschine usw. kann auch mal die aufgenommenen Leistung angegeben sein.
Dies erkennt man meist daran das keine anderen Daten vorhanden sind , wie der Leistungsfaktor Cosinus Phi oder der Wirkungsgrad Eta.
Um die vom Motor aufgenommenen elektrische Leistung zu berechnen gibt es nun zwei Verfahren.
Welches man davon benutzt ist auch abhängig davon welche Werte alle auf dem Typenschild angegeben sind.
Buchstabe Eta ( n )bezeichnet und in Prozent (%) angegeben.
Eta ist die Prozentangabe der Ausgangsleistung zur Eingangsleistung.
Habe ich also zum Beispiel eine mechanische Ausgangsleistung von wie hier 7,5 kW, so sind das 88,7% der elektrischen Eingangsleistung.
Damit kann ich dann die Eingangsleistung wie folgt ausrechnen.
P_in = (P_out/ n) * 100
P_in = (7,5 kW / 88,7) * 100
P_in= 8,4kW
 Hat man aber auf dem Typenschild auch die Angaben von Strom und Spannung und den Cosinus Phi
Hat man aber auf dem Typenschild auch die Angaben von Strom und Spannung und den Cosinus Phi lässt sich Leistungsaufnahme auch mit diesen Angaben berechnen
Die Leistung die vom Motor aufgenommen wird entspricht also 8,42 kW
 Der Wirkungsgrad sagt etwas über die effizientes des Motors aus.
Der Wirkungsgrad sagt etwas über die effizientes des Motors aus.Ein Wirkungsgrad von 100% würde bedeuten das alles was man an Energie in den Motor steckt auch
hinten wieder raus kommt.
Was natürlich nie der Fall ist weil es immer Verluste in Form von Reibung ,
Wärme usw.gibt.
Der Wirkungsgrad wird angegeben mit dem griechischen Zeichen n (Eta)
und wird wie folgt berechnet:
Im vorliegenden Fall ist dieser Wirkungsgrad allerdings schon auf dem Typenschild angegeben und
beträgt 0,89.
Manchmal wird der Wirkungsgrad auch in Prozent angegeben und wäre dann 89%.
 Es ist möglich einen Drehstrom Motor an einer Phase, also den Haushalt üblichen Wechselstrom an
Es ist möglich einen Drehstrom Motor an einer Phase, also den Haushalt üblichen Wechselstrom an zu schließen.
Dazu wird mittels eines Kondensator eine sogenannte Hilfsphase erzeugt.
Diese Hilfsphase erzeugt durch einen Kondensator eine künstlichen Phasenverschiebung und simuliert
damit eine dritte Phase.
Damit kann auch ein Drehstrom Motor an nur einer Phase und den Null Leiter angeschlossen werden.
Weil es sich aber nur um eine simulierte dritte Phase handelt beträgt die Leistung des Motor nur etwa
70% der sonst üblichen Leistung.
Die Größe des Kondensator richtet sich nach der Leistungsaufnahme des Motors.
Als Faustformel kann man sagen das pro 1 KW Motorleistung der Kondensator eine Kapazität von 70uF
haben sollte.
Um bei dieser Schaltung die Drehrichtung zu ändern wird die Seite des Kondensator die am Neutral Leiter
angeschlossen ist abgeklemmt und an L1 angeklemmt.
 Hier einige grundsätzliche Dinge die für
alle Motoren Geltung haben,
Hier einige grundsätzliche Dinge die für
alle Motoren Geltung haben,egal ob sie mit Gleich - Wechsel oder Drehstrom betrieben werden.
Die Angabe der Drehrichtung bezieht sich immer auf die Kraft ausgebende Welle .
Standardmäßig ist diese Drehrichtung immer rechtsdrehend.
sondern immer auf die vom Motor abgegebene Leistung.
Ein 2 KW Motor gibt also eine Leistung von 2 KW ab, was so viel heißt das man aus diesen 2KW die Stromaufnahme
nur berechen kann wenn man auch den Wirkungsgrad mit einbezieht.
Der Wirkungsgrad ist das Verhältnis zwischen aufgenommener und abgegebener Leistung und liegt immer unter 1 .
Angenommen die Leistungsaufnahme beträgt 1 kW und die Leistungsabgabe 0,8 kW, dann beträgt der Wirkungsfaktor 1kW mal 0,8 kW= 0,8.
Der Wirkungsgrad (n) beträgt also 0,8 , oder 80%.
Und Spulen haben nicht nur einen reellen Ohmschen Widerstand sondern auch einen Induktiven.
Dadurch folgt auch ein unerwünschte Blindleistung die in Form eines Faktors mit der Bezeichnung "Cos phi φ " angegeben wird.
Dieser Faktor entspricht 1 wenn die Scheinleistung gleich der Wirkleistung entspricht was nur theoretisch der Fall wäre.
In der Praxis liegt dieser Wert immer unter 1.
Wenn dieser Wert zu niedrig ist muss zuviel Blindleistung übertragen werden was ineffizient und damit unerwünscht ist.
Je kleiner dieser Wert liegt um so höher wird das Stromnetz mit einer Blindleistung sinnlos belastet.
Eine höherer Belastung durch unerwünschten Blindstrom erfordert auch größere Leitungsquerschnitte und somit höhere Kosten.
In der Regel liegt dieser Faktor nicht unter 0,85
Die Betriebsart soll aufzeigen in wie weit der Motor für die dauerhafte Belastung ausgelegt ist.
| Kennzeichen |
Betriebsart | Zusatz Angaben |
| S1 |
Dauerbetrieb (DB) Dauerbetrieb mit konstanter Belastung Der Motor darf mit seiner Nennbelastung dauernd betrieben werden. | |
| S2 |
Kurzzeitbetrieb (KB) Bei Kurzzeitbetrieb ist die Betriebsdauer so kurz, dass die Beharrungstemperatur nicht erreicht wird. Der Motor kühlt in den Pausen auf Ausgangstemperatur ab. | Belastungsdauer |
| S3 |
Aussetzbetrieb (AB) Beim Aussetzbetrieb sind die Pausen so kurz, dass der Motor sich nicht auf die Ausgangstemperatur abkühlen kann. Die Spieldauer beträgt 10 Minuten. Wenn der Anlaufstrom für die Erwärmung unerheblich ist. | Relative Einschaltdauer in Prozent Angabe bezieht sich auf 10 Minuten |
| S4 |
Periodischer Aussetzbetrieb (AB) Beim Aussetzbetrieb sind die Pausen so kurz, dass der Motor sich nicht auf die Ausgangstemperatur abkühlen kann. Die Spieldauer beträgt 10 Minuten. liegt vor wenn der Bremsstrom erheblich ist. | Relative Einschaltdauer in Prozent Angabe bezieht sich auf 1 Stunde Trägheitsmoment- Hochlaufzeit- Auslaufzeit |
| S5 |
Periodischer Aussetzbetrieb (AB) mit Einfluss des Anlaufvorganges und elektrischer Bremsung | Relative Einschaltdauer in Prozent. Schaltspiele /Stunde Trägheitsmoment- Hochlaufzeit- Auslaufzeit |
| S6 |
Ununterbrochener periodischer Betrieb | Relative Einschaltdauer in Prozent bezogen au 10 min. |
| S7 |
Ununterbrochener periodische Betrieb mit elektrischer Bremsung. |
Schaltspiele /Stunde Trägheitsmoment- Hochlaufzeit- Auslaufzeit |
| S8 |
Ununterbrochener periodische Betrieb mit Last und Drehzahländerung. |
Schaltspiele /Stunde Trägheitsmoment- Hochlaufzeit- Auslaufzeit |
| S9 |
Betrieb mit nicht periodischer Last und Drehzahländerung. |
Schaltspiele /Stunde Trägheitsmoment- Hochlaufzeit- Auslaufzeit |
| S10 |
Betrieb mit einzelnen konstanten Belastungen |
Ist hier kein Fehler feststellbar kann mit der elektrischen Überprüfung des Motors begonnen werden.
Der Motor muss nun freigeschaltet und gegen Wiedereinschalten gesichert werden, anschließend wird das Klemmbrett
am Motor geöffnet.
Ist die Spannungsfreiheit festgestellt werden alle Brücken im Motorklemmbrett
entfernt, die Messung des Motors beginnt.
Zuerst wird eine Isolationsmessung mit einem Isolationsmessgerät vorgenommen.
Bei dieser Messung muss jede Wicklung gegen das Gehäuse
(Erde) und die Wicklungen untereinander (Mindestwert von 0,5 MΩ) gemessen werden.
Wicklung U1-U2 gegen V1-V2 und W1-W2 und gegen Erde;
Wicklung V1-V2 gegen U1-U2 und W1-W2 und gegen Erde;
Wicklung W1-W2 gegen V1-V2 und U1-U2 und gegen Erde.
Danach werden die einzelnen Wicklungsstränge (U1-U2, V1-V2, W1-W2) mit einem
Widerstandsmessgerät durchgemessen und der ermittelte Widerstandswert festgehalten.
Normalerweise gibt es nur geringe Abweichungen in den Werten. Sollten mehr als 2 %
Abweichung gemessen werden ist von einem Wicklungsschluss auszugehen.
 Ein Reihenschluss Motor bezeichnet man auch als Universal oder Allstrom Motor.
Ein Reihenschluss Motor bezeichnet man auch als Universal oder Allstrom Motor.Wie der Name schon vermuten lässt hat dieser Motor den Vorteil das er sich mit Gleichspannung
sowohl auch mit Wechselspannung betreiben lässt.
Häufig findet man diese Art der Motoren in Haushaltsgeräte wie Mixer, Staubsauger , Bohrmaschine usw.
Die von außen angelegte Spannung wird über Kohlebürsten der Ankerwicklung zugeführt ,
gleichzeitig befindet sich aber in Reihe zur Ankerwicklung auch eine Ständerwicklung so das der
Strom durch beide Wicklungen gleichzeitig fließt.
Bei Betrieb mit einer Gleichspannung wird die Ankerwicklung durch den Kommutator laufend
umgepolt und erzeugt damit ein Drehfeld.
Bei Betrieb mit Wechselspannung wird durch die Wechselspannung die Feldspule ständig mit
umgepolt.
Der Vorteil des Reihenschluss Motore liegt im hohen Drehmoment bei niedriger Drehzahl.
Wenn die Wicklungen einzeln heraus geführt sind tragen sie folgende Bezeichnungen:
A1- A2 = Ankerwicklung
D1-D2 = Feldwicklung
Der Nachteil bei diesen Motoren liegt an den Verschleiß der Kohlebürsten.
Außerdem entstehen Funken durch den Stromübergang an den schleifenden Kohlebürsten
die für Störungen in Rundfunkgeräte führen.
Das besondere an einen Reihenschluss Motor ist die Abhängigkeit der Geschwindigkeit durch die Spannungshöhe.
 Ein Gleichstrom Motor besitzt zwei Kohlebürsten die in der Skizze mit Plus und
Ein Gleichstrom Motor besitzt zwei Kohlebürsten die in der Skizze mit Plus und Minus bezeichnet sind.
Diese Kohlebürsten werden mit Spannung beaufschlagt und schleifen über den
Kommutator ( braun ) .
Dadurch wird die Spule im Anker ( Anker ist der drehende Teil des Motor) mit Strom
versorgt und bildet ein Magnetfeld aus.
Ein anderes Magnetfeld gebildet durch einen permanent Magneten sitzt im Ständer
(Ständer ist das feststehende Teil eines Motor).
Dadurch richtet sich der Anker entsprechend der Magnetkraft aus ,würde aber in einer
bestimmten Position wieder stehen bleiben.
Nun aber wird durch den Kommutator ( braun) die Spannungsrichtung geändert,
damit wechselt sich auch das Magnetfeld und der Anker dreht sich weiter.
Die Drehrichtung kann einfach geändert werden indem die Betriebsspannung an den
von einer Norm festgelegten Anschlüsse A1 und A2 getauscht wird.
Der Gleichstrom Motor kann auch als Generator dienen.
Wenn der Motor manuell gedreht wird kann man an den Anschüssen A1 und A2
einen Strom entnehmen.
| Klemmenbezeichnung |
||||
| Aktuelle Kennzeichnung |
Alte Kennzeichnung |
|||
| Anker |
A1 |
A2 |
A |
B |
| Nebenschlußfeld |
E1 |
E2 |
C |
D |
| Reihenschlußfeld |
D1 |
D2 |
E |
F |
| Wendepolwicklung |
B1 |
B2 |
GW |
HW |
| Kompensationswicklung |
C1 |
C2 |
GK |
HK |
| Fremderregung |
F1 |
F2 |
I |
K |
Die meisten Motoren haben dauerhaft geschmierte Lager und vertragen meist nur Temperaturen von max. ca. 80°C.
Diese Temperatur sollte also nicht überschritten werden weil die Lager dann ihr Fett verlieren.
Das Fett wird bei hohen Temperaturen sehr fließfähig bis sehr flüssig und tritt dann aus den Lagern aus.
Ohne Fett halten die Lager dann nicht mehr lange.
Meist kann man es an einen rasselnden Geräusch vernehmen und sollte sich darauf einstellen die Lager zu tauschen.
Außerdem befinden sich im inneren der Motoren gewickelte Drahtspulen deren einzelnen Windungen mit einen dünnen
Lackschicht isoliert sind um Kurzschlüsse zu vermeiden.
In Folge zu großer Hitze kann es passieren das der Isolier Lack verbrennt und dadurch einzelnen Windungen durch
schadhafte Isolierung einen direkten Kontakt bilden.
Dadurch wird der Strom größer und der Motor erhitzt sich noch mehr bis er dann den Hitze tot erleidet.
Bei Drehzahl geregelte Motoren sollte man beachten das sich meist ein Lüfterrad auf der Motorwelle befindet und
der Motor durch dieses Lüfterrad in der Regel gekühlt wird.
Wenn der Motor aber langsamer läuft weil evtl. die Drehzahl geregelt und die entsprechende Nenn Drehzahl nicht
mehr erreicht wird ,auch der Lüfter nicht mehr die angemessenen Kühlung liefert.
In solchen Fällen sollte man auf einen Extern betriebenen Lüfter zurück greifen.
Im Motorschutz Relais für einen Drehstrom Motor befinden sich drei Bimetall Kontakte die jeweils vom Motor strom
durchflossen sich gleichmäßig erwärmen und sich dadurch im Gleichgewicht befinden.
Bei überhöhter Wärme, zum Beispiel bei erhöhter Stromaufnahme öffnet sich die drei Kontakte und schaltet damit den
Motor ab.
Das gleiche passiert aber auch wenn nur eine Phase ausfällt, infolge sich dann zwei Bimetall Kontakte im Gleichgewicht,
einer aber im Ungleichgewicht befindet und der Motorschutz schaltet ab.
Dadurch wird verhindert das ein zu startender Motor nicht nur mit 2 Phasen startet.
Das Motorschutz Relais schütz also den Motor vor Nichtanlauf ,vor Überlastung und vor Phasenausfall.
Motorschutz Relais haben einen Einstell Regler um die benötigte Stromstärke ein zu stellen, außerdem eine einstellbare
Temperatur Skala um die dauerhafte Umgebungs Temperatur einstellen zu können.
Viele Motorschutz Relais haben noch einen Reset Taster um ein ausgelöstes Relais wieder Rück zu stellen.
Dieser Rückstellen lässt sich manchmal auch auf Automatisch stellen, so das dass Motorschutz Relais nach der Auslösung
und einer anschließende Abkühl zeit sich wieder von alleine Rück stellt.
Ohne das jeweilige Datenblatt zu Rate zu ziehen , kann man sagen das in der Regel ein Motorschutz bei doppelter Nennstrom
stärke nach ca. 1 Minute abschaltet.
Ein Motorschutz Relais für drei Phasen lässt sich auch für einen Drehstrom Motor verwenden.
Aktualisiert 13.11.2024