und somit nicht sauber gesteuert werden konnte , soll hier eine Fernbedienung mit Funk erstellt werden.
Als Modul dient ein Modul RF7020 der Firma Octamex. 
Das Modul arbeitet mit einer Betriebsspannung von 5 Volt und passt so wunderbar zum Atmega der auch mit 5 Volt arbeitet.Die Datenübertragung zwischen Modul und Mikroprozessor findet Seriell statt über TXD und RXD.
Die Standard Datenübertragungsrate ist 9600 Baud, also sollte der Mikroprozessor in der Lage sein die Geschwindigkeit zu ermöglichen
was hervorragend gelingt wenn man einen Quarz mit 3,6864 nutzt.
Man muss natürlich darauf achten das auch der Empfänger mit der gleichen Datenübertragungsrate arbeitet.
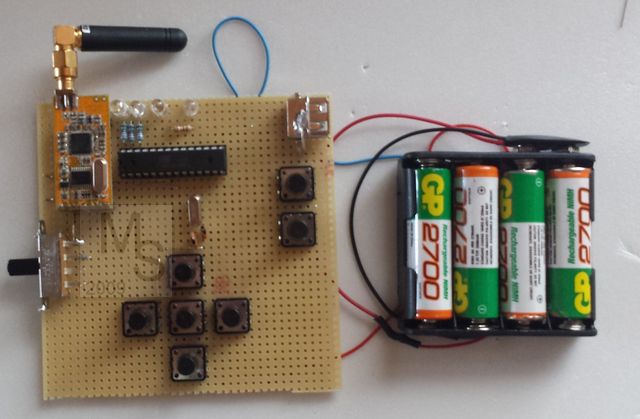
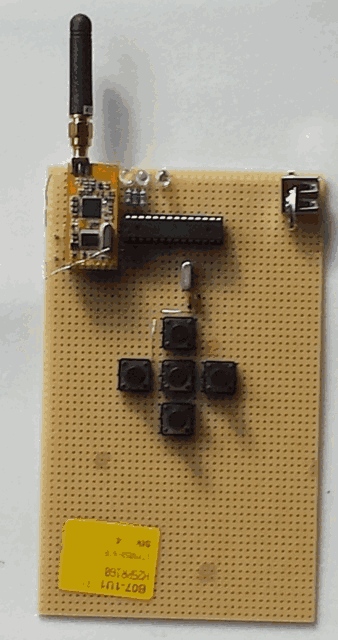 Hier sieht man den ersten Entwurf mit fünf Tasten für die Funktionen Vor/Zurück , Links/Rechts, und Stop.
Hier sieht man den ersten Entwurf mit fünf Tasten für die Funktionen Vor/Zurück , Links/Rechts, und Stop.Darüber der Quarz , und oberhalb vom Quarz der Mikroprozessor "Atmega 8".
Rechts oben in der Ecke Eine USB-Kupplung die als Programmierschnittstelle dient.
Weiter noch drei Leuchtdioden als Funktionsanzeigen
und eben das besagte Funkmodul.
Die Verbindung zwischen Funk Modul und Prozessor besteht nur aus 4 Leitungen.
| Pin |
Funktion |
Beschreibung |
| 1 |
GND |
Masse |
| 2 |
Vcc |
Plus 5 V |
| 3 |
------- |
------- |
| 4 |
TXD |
Sendeleitung |
| 5 |
RXD |
Empfangsleitung |
| 6 |
------- |
------- |
| 7 |
------- |
------- |
Durch drücken der jeweiligen Tasten werden Kommandos verschickt , die später dann mein Ferngesteuertes Fahrzeug steuern sollen.
Taste "nach oben" für Vorwärts fahrt ( beide Motoren vor)
Taste "mittig" für Stop ( Alle Motoren Stop )
Taste "nach unten" für Rückwärts fahrt ( Alle Motoren zurück)
Taste "nach links" für linker Motor vor
Taste "nach rechts" für rechter Motor vor
Beim senden eines Befehls leuchtet kurz die Weiße Led auf um zu signalisieren das der Befehl verschickt wurde,
anschließend leuchtet kurz die blaue Led auf weil der Empfänger das
Signal zurück sendet.Damit wird überprüft ob das Signal auch korrekt am Empfänger angekommen ist.
| Funk Sender |
||
| Zeile |
Programmcode |
Erklärung |
| Allgemeine Prozessor Konfiguration | ||
| 1 |
$regfile "m8def.dat" | Definiert den Atmega als Atmega8 |
| 2 |
$crystal = 3686400 | Gibt die Quarzfrequenz an in Herz |
| 3 |
$hwstack = 32 | Defaultwert 32 Hardware reservierte Speicher |
| 4 |
$swstack = 10 | Default Software Reservierung Speicher |
| 5 |
$baud=9600 |
|
| Konfiguration der Ein/Ausgänge | ||
| 6 |
Ddrc.5=1 | Port wird als Ausgang gesetzt für Weiße Led |
| 7 |
Ddrc.4=1 | Port wird als Ausgang gesetzt für Orange Led |
| 8 |
Ddrc.3=1 | Port wird als Ausgang gesetzt für Blaue Led |
| 9 |
Portd.2=1 | PullUp setzen für Schalter S1 |
| 10 |
Portd.3=1 | PullUp setzen für Schalter S2 |
| 11 |
Portd.4=1 | PullUp setzen für Schalter S3 |
| 12 |
Portd.5=1 | PullUp setzen für Schalter S4 |
| 13 |
Portd.6=1 | PullUp setzen für Schalter S5 |
| Variable deklarieren |
||
| 14 |
Dim a as word |
Damit Orange Betriebs_Led langsam blinkt |
| Konfiguration zum Senden und Empfangen von Daten über USAR |
||
| 15 |
Enable interrupts |
Interrupts Global freigeben |
| 16 |
on urxc Datenempfang |
Routine festlegen die beim Interupt aufgerufen wird |
| 17 |
enable urxc |
Empfangspuffer freigeben |
| 18 |
dim x as byte |
Variable in der die Empfangenen Zeichen rein kopiert werden |
| Programm Anfang | ||
| 19 |
Do | Anfang der Programmschleife |
| 20 |
A=A+1 |
Variable beim Schleifendurchgang hoch zählen |
| 21 |
If A > 64900 Then Portc.4 = 1 Else Portc.4 = 0 |
Beim Wert über 64900 geht Orange Led an um bei 65535 wieder aus zu gehen |
| 22 |
if pind.2=0 then gosub Taste_auf |
Wenn Taste gedrückt zur Routine springen |
| 23 |
if pind.3=0 then gosub Taste_links | Wenn Taste gedrückt zur Routine springen |
| 24 |
if pind.4=0 then gosub Taste_mitte | Wenn Taste gedrückt zur Routine springen |
| 25 |
if pind.5=0 then gosub Taste_rechts | Wenn Taste gedrückt zur Routine springen |
| 26 |
if pind.6=0 then gosub Taste_unten | Wenn Taste gedrückt zur Routine springen |
| 27 |
loop |
|
| Routine für "Taste auf" |
||
| 28 |
Taste_auf: |
Anfang der Routine |
| 29 |
Portc.5=1 |
Weiße Led an |
| 30 |
Printbin 1 |
Wert 1 über TXD versenden |
| 31 |
waitms 50 |
Pause |
| 32 |
Portc.5=0 |
Weiße Led aus |
| 33 |
Return |
Ende der Routine und Rücksprung von wo her gekommen |
| Routine für "Taste links" |
||
| 34 |
Taste_links: |
|
| 35 |
Portc.5=1 |
|
| 36 |
Printbin 2 |
|
| 37 |
waitms 50 |
|
| 38 |
Portc.5=0 |
|
| 39 |
Return |
|
| Routine für "Taste mitte" |
||
| 40 |
Taste_mitte |
|
| 41 |
Portc.5=1 |
|
| 42 |
Printbin 3 |
|
| 43 |
Waitms 50 |
|
| 44 |
Portc.5=0 |
|
| 45 |
Return |
|
| Routine " Taste rechts" |
||
| 46 |
Taste_rechts: |
|
| 47 |
Portc.5=1 |
|
| 48 |
Printbin 4 |
|
| 49 |
Waitms 50 |
|
| 50 |
Portc.5=0 |
|
| 51 |
Return |
|
| Routine "Taste unten" |
||
| 52 |
Taste_unten: |
|
| 53 |
Portc.5=1 |
|
| 54 |
Printbin 5 |
|
| 55 |
waitms 50 |
|
| 56 |
Portc.5=0 |
|
| 57 |
Return |
|
| Routine zum Empfang der Daten |
||
| 58 |
Datemempfang: |
|
| 59 |
X=UDR |
Empfangener Wert aus Register UDR in Variable X kopieren |
| 60 |
Portc.3=1 |
Blaue Led an |
| 61 |
Waitms 100 |
Pause |
| 62 |
Portc.3=0 |
Blaue Led aus |
| 63 |
Return |
|
Viele der Anschluss-Pins des Atmega haben mehrere Funktionen , Standardmäßig können die meisten Pins als Digitale Ein oder Ausgänge benutzt werden,
mit der Anweisung $Baud wird der Atmega 8 angewiesen die Pins 2 und 3 als sogenannten UART Schnittstelle bereitzustellen
an denen dann Daten gesendet und empfangen werden können.
Diese Datenschnittstelle wird mit der Gegenstelle nicht Synchronisiert, deswegen muss auf beiden Seiten sichergestellt sein das die Daten mit gleicher Geschwindigkeit
gesendet wie auch empfangen werden.
Die Geschwindigkeit ist im Funkmodul Standardmäßig mit 9600 Baud festgelegt, also muss auch der Mikroprozessor mit 9600 Baud arbeiten.
Ein Taster um die Geschwindigkeit zu erhöhen (Taster S7) , und einen um die Geschwindigkeit zu verringern (Taster S6).
Und wenn ich einmal dabei bin noch eine zusätzliche Led( Grün).
| Funk Sender |
||
| Zeile |
Programmcode |
Erklärung |
| Allgemeine Prozessor Konfiguration | ||
| 1 |
$regfile "m8def.dat" | Definiert den Atmega als Atmega8 |
| 2 |
$crystal = 3686400 | Gibt die Quarzfrequenz an in Herz |
| 3 |
$hwstack = 32 | Defaultwert 32 Hardware reservierte Speicher |
| 4 |
$swstack = 10 | Default Software Resvierung Speicher |
| 5 |
$baud=9600 |
|
| Konfiguration der Ein/Ausgänge | ||
| 6 |
Ddrc.5=1 | Port wird als Ausgang gesetzt für Weiße Led |
| 7 |
Ddrc.4=1 | Port wird als Ausgang gesetzt für Orange Led |
| 8 |
Ddrc.3=1 | Port wird als Ausgang gesetzt für Blaue Led |
| Ddrc.2=1 |
Port als Ausgang für Grüne Led |
|
| 9 |
Portd.2=1 | PullUp setzen für Schalter S1 |
| 10 |
Portd.3=1 | PullUp setzen für Schalter S2 |
| 11 |
Portd.4=1 | PullUp setzen für Schalter S3 |
| 12 |
Portd.5=1 | PullUp setzen für Schalter S4 |
| 13 |
Portd.6=1 | PullUp setzen für Schalter S5 |
| Portd.7=1 |
PullUp setzen für Schalter S6 | |
| Portb.0=1 |
PullUp setzen für Schalter S7 | |
| Variable deklarieren |
||
| 14 |
Dim a as word |
Damit Orange Betriebs_Led langsam blinkt |
| Konfiguratiuon zum Senden und Empfangen von Daten über USAR |
||
| 15 |
Enable interrupts |
Interrupts Global freigeben |
| 16 |
on urxc Datenempfang |
Routine festlegen die beim Interupt aufgerufen wird |
| 17 |
enable urxc |
Empfangspuffer freigeben |
| 18 |
dim x as byte |
Variable in der die Empfangennen Zeichen rein kopiert werden |
| Programm Anfang | ||
| 19 |
Do | Anfang der Programmschleife |
| 20 |
A=A+1 |
Variable beim Schleifendurchgang hoch zählen |
| 21 |
if A=60000 then Toggle portc.4 |
Beim Wert von 60000 immer die Orange Led umschalten |
| 22 |
if pind.2=0 then gosub Taste_auf |
Wenn Taste gedrückt zur Routine springen |
| 23 |
if pind.3=0 then gosub Taste_links | Wenn Taste gedrückt zur Routine springen |
| 24 |
if pind.4=0 then gosub Taste_mitte | Wenn Taste gedrückt zur Routine springen |
| 25 |
if pind.5=0 then gosub Taste_rechts | Wenn Taste gedrückt zur Routine springen |
| 26 |
if pind.6=0 then gosub Taste_unten | Wenn Taste gedrückt zur Routine springen |
| If Pinb.0 = 0 Then Gosub Schneller |
Wenn Taste gedrückt zur Routine springen | |
| If Pind.7 = 0 Then Gosub Langsamer |
Wenn Taste gedrückt zur Routine springen | |
| 27 |
loop |
|
| Routine für "Taste auf" |
||
| 28 |
Taste_auf: |
Anfang der Routine |
| 29 |
Portc.5=1 |
Weiße Led an |
| 30 |
Printbin 1 |
Wert 1 über TXD versenden |
| 31 |
waitms 50 |
Pause |
| 32 |
Portc.5=0 |
Weiße Led aus |
| 33 |
Return |
Ende der Routine und Rücksprung von wo her gekommen |
| Routine für "Taste links" |
||
| 34 |
Taste_links: |
|
| 35 |
Portc.5=1 |
|
| 36 |
Printbin 2 |
|
| 37 |
waitms 50 |
|
| 38 |
Portc.5=0 |
|
| 39 |
Return |
|
| Routine für "Taste mitte" |
||
| 40 |
Taste_mitte |
|
| 41 |
Portc.5=1 |
|
| 42 |
Printbin 3 |
|
| 43 |
Waitms 50 |
|
| 44 |
Portc.5=0 |
|
| 45 |
Return |
|
| Routine " Taste rechts" |
||
| 46 |
Taste_rechts: |
|
| 47 |
Portc.5=1 |
|
| 48 |
Printbin 4 |
|
| 49 |
Waitms 50 |
|
| 50 |
Portc.5=0 |
|
| 51 |
Return |
|
| Routine "Taste unten" |
||
| 52 |
Taste_unten: |
|
| 53 |
Portc.5=1 |
|
| 54 |
Printbin 5 |
|
| 55 |
waitms 50 |
|
| 56 |
Portc.5=0 |
|
| 57 |
Return |
|
| Routine " Taster schneller" |
||
| Schneller: | ||
| Portc.5 = 1 | ||
| Printbin 6 | ||
| Waitms 50 | ||
| Portc.5 = 0 |
||
| Return | ||
| Routine "Taste langsamer" |
||
| Langsamer: | ||
| Portc.5 = 1 | ||
| Printbin 7 | ||
| Waitms 50 |
||
| Portc.5 = 0 | ||
| Return | ||
| Routine zum Empfang der Daten |
||
| 58 |
Datemempfang: |
|
| 59 |
X=UDR |
Empfangener Wert aus Register UDR in Variable X kopieren |
| 60 |
Portc.3=1 |
Blaue Led an |
| 61 |
Waitms 100 |
Pause |
| 62 |
Portc.3=0 |
Blaue Led aus |
| 63 |
Return |
|
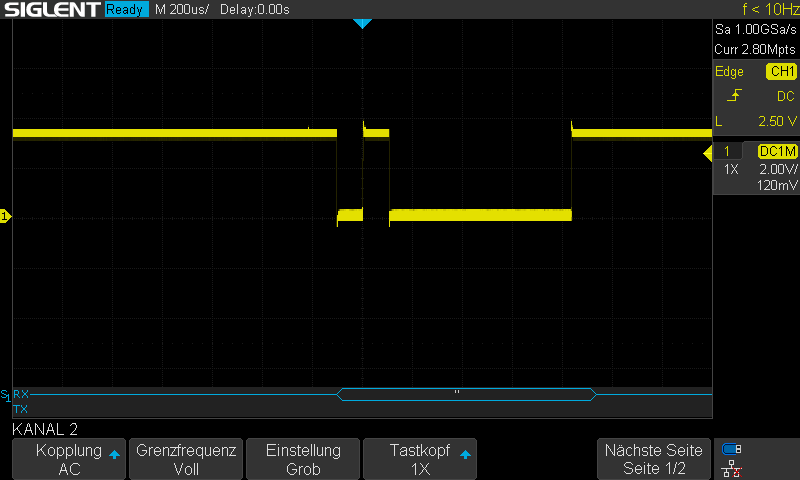
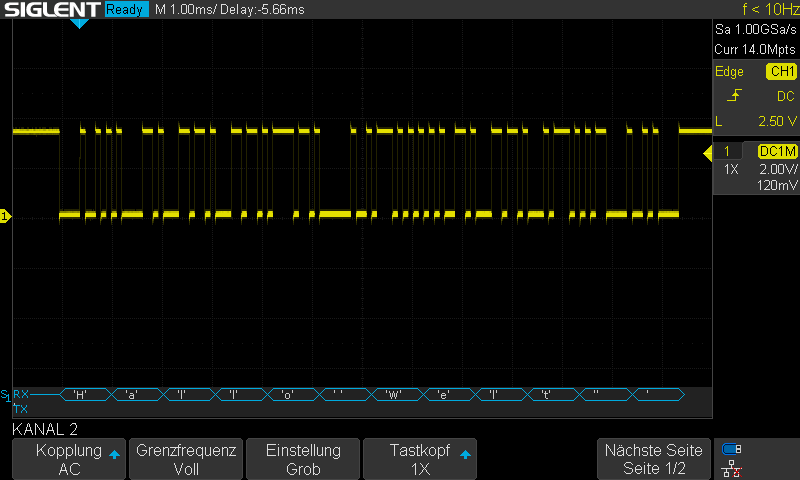
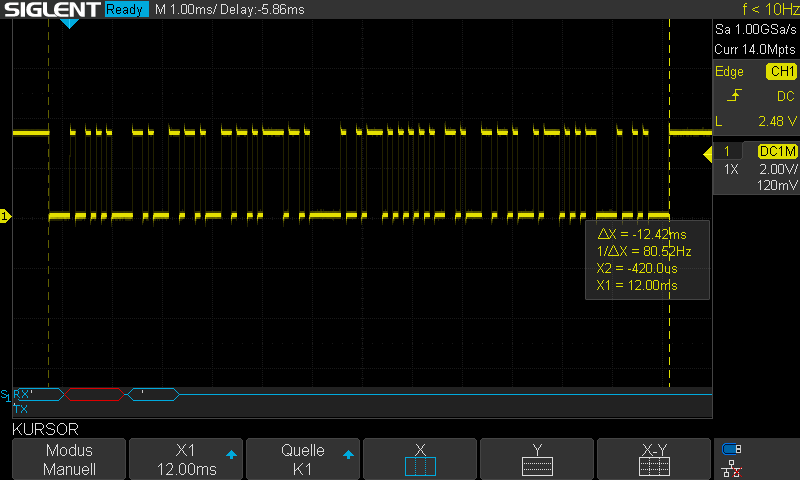
Zunächst wissen wir das die Daten mit einer Geschwindigkeit von 9600 Baud / Sekunde übertragen werden.
Ein Baud besteht in diesen Fall aus 8 Datenbits und ein Stopbit, also 9 Zeichen.
9600/9 = 1066 Bits/Sekunde
Somit wird alle 0,9375 mSekunden ein Zeichen übertragen.
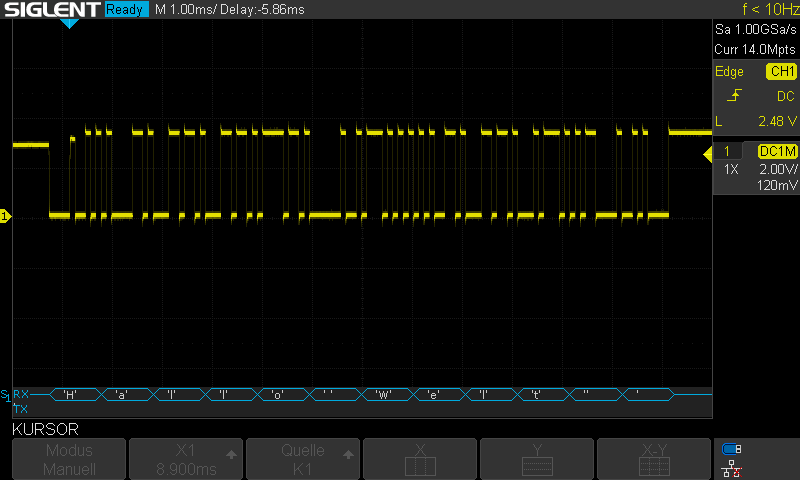
Um Also das Wort " Hallo Welt" zu übertrage werden also 5 Zeichen für Hallo , 1 Zeichen als Leerzeichen und noch einmal 4 Zeichen für Welt übertragen.
Das macht 10 Zeichen + Stopzeichen= 11 Zeichen
11 Zeichen mal 0,9375= 10 mSekunden , also 10 Zeichen in einer Sekunde.
| Taste |
Zeichen |
Signal |
| S1 |
1 |
 |
| S3 |
3 |
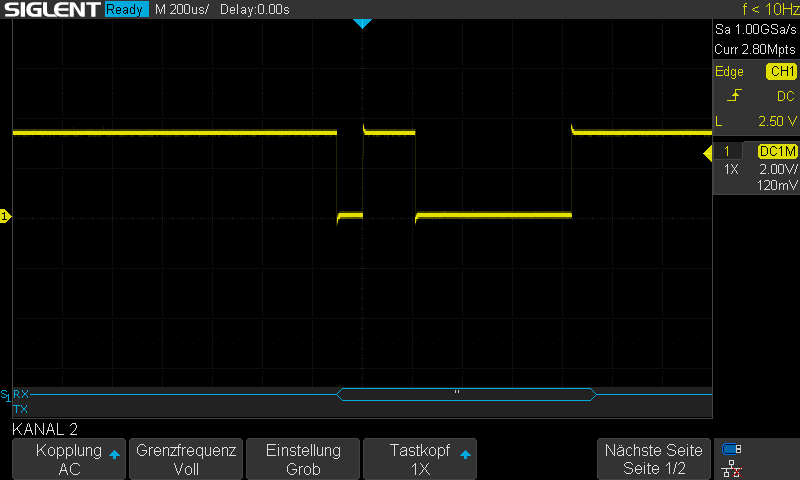 |
| S5 |
5 |
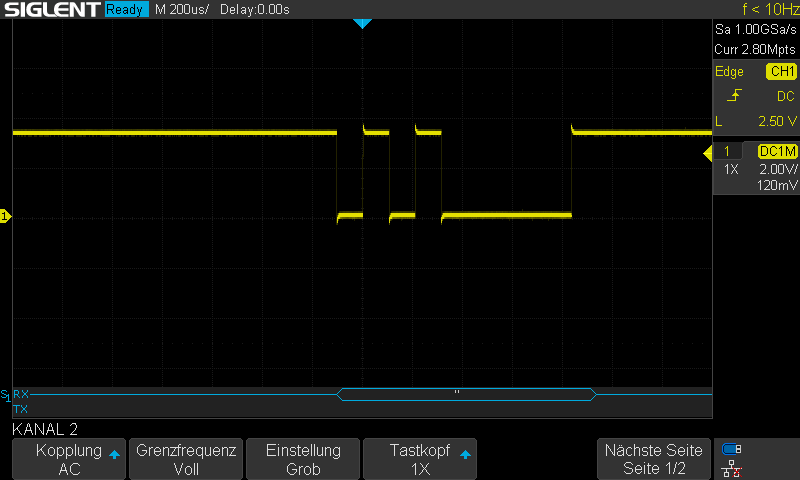 |
| Hallo Welt |
 |
|
 |
||
 |
||
| Ascii Zeichen |
|||||
| H |
0100 |
1000 |
|||
| a |
0110 |
0001 |
|||
| l |
0110 |
1100 |
|||
| o |
0110 |
1111 |
| Stromverbrauch bei 5 Volt Betriebsspannung |
mA |
| Atmega |
8 |
| Funkmodul im Leerlauf |
20 |