erstellt 2.02.2016
nur eine Geschwindigkeit , billige Fernbedienung,usw. begab ich mich daran eine eigene Steuerung zu entwickeln.
Dazu nahm ich den Panzer dessen Material fast nur aus billigen Kunststoff bestand auseinander und entfernte alle Elektronischen Bauteile
bis auf die Zwei Antriebsmotoren und den Akku.
Die beiden Motoren benötigen eine Spannung zwischen 5 und 7 Volt und das eingebaute Akkupack stellt eine Spannung von 7,2 V zu Verfügung, außerdem verfügen die Motoren über ein Getriebe.
So sah der Panzer aus bevor ich Hand an ihn gelegt hatte.
auf der rechten Seite sieht man die zwei Antriebsmotoren inklusive Getriebe.
Die beiden Kabel kommen vom Batterieschacht und gehen zur linken Seite an dem sich ein Ein/Aus Schalter befindet.
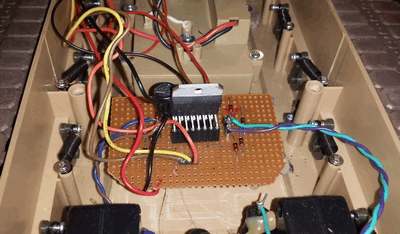
Als erstes wird eine Motorsteuerung eingebaut die hauptsächlich einen Treiberbaustein L298 beinhaltet.
Der Treiberbaustein sorgt dafür das die Motoren in zwei Richtungen laufen können ,also vor und zurück.
Der Treiber kann aber noch eine Menge mehr, wird aber hier nicht zur Anwendung gebracht.
Er kann zum Beispiel die Motoren vor Überlast schützen indem sie rechtzeitig abgeschaltet werden wenn ein bestimmter
Strom überschritten wird.
- Beide Motoren sollen gesteuert werden und zwar vor und zurück und in variable Geschwindigkeit
- Die Steuerung sollte über Funk ausgeführt werden
- Als Anzeige sollte ein LCD Anzeige sowie mehrere Leuchtdioden dienen.
- Mit
Infrarot Sensoren sollte ermöglicht werden das der Panzer hinter mir
her fahren kann ohne gesteuert zu werden, er sollte also mein Wärmebild
erfassen

Außerdem ist der vom Preis noch erschwinglich mit ca, 3-4 Euro.
dazu besitzt die Motorsteuerung mit dem Motortreiber L298 pro Motor insgesamt 3 Eingänge davon sind zwei Eingänge zuständig um der Steuerung
das Signal zu geben ob der Motor vor oder zurück drehen soll, und eine Steuerleitung um den Motor frei zu geben,
ergo werden für zwei Motoren insgesamt 6 Steuerleitungen benötigt die vom Mikroprozessor angesteuert werden müssen.
nicht alle belegt werden müssen.
Pro Motor sind drei Eingänge vorhanden wovon 2 Eingänge die Drehrichtung des Motor angeben,
und der dritte Eingang gibt den Motor bei Bedarf frei.
L298 Datenblatt
 Bild 3
Bild 3
Die Dioden dienen dazu dass sogenannte Induktionsströme nicht den Baustein zerstören die unweigerlich auftreten wenn die Motoren abgeschaltet werden.
Die Anschlüsse auf der linken Seite B0,B2,D4,D5,D6,B1 sowie GND und VCC, werden später mit dem Prozessor verbunden.
Bild 4
| Eingang |
Kabel |
Motor rechts vor | Motor rechts Stop |
Motor rechts zurück |
| B0 |
1 |
X |
0 |
|
| B1 |
0 |
X |
1 |
|
| B2 Freigabe |
Rot |
1 |
0 |
1 |
| Eingang |
Kabel |
Motor links vor |
Motor links Stop |
Motor links zurück |
| D4 Freigabe |
Braun |
1 |
0 |
1 |
| D5 |
0 |
X |
1 |
|
| D6 |
1 |
X |
0 |
alternativ kann auch ein 2 mal 16 Zeichen Modul Verwendung finden dann
muss allerdings das Programm später geringfügig geändert werden.

Es sind 7 Anschlüsse vorhanden , von denen aber nur 4 Stück benötigt werden.
- Vcc ( Plus 5 Volt)
- GND ( Masse)
- TXD ( Sendeleitung)
- RXD ( Empfangsleitung)
Da pro Sensor eine Signal ausgegeben wird , müssen diese beiden Signal an zwei Analogeingänge des Prozessors erfasst und mittels Software ausgewertet werden.
Auch dieses Modul arbeitet mit einer Betriebsspannung von 5 Volt.
Bei der Analogmessung werden bei bedeckten Sensoren 5 Volt ausgegeben das entspricht 1024 Bit.
Datenblatt

Aufbau mit Atmega 32
Die
Grundplatine beinhaltet einen Spannungsregler der für eine Konstante
Spannung von 5 Volt sorgt, mehrere Led's zu Prüf und Anzeige von
Betriebszustände,
eine ISP Schnittstelle über die der Atmega
programmiert wird, einen Quarz von 8 Mhz für die Taktfrequenz des
Atmega's , und eine LCD Anzeige mit 4 mal 16 Zeichen.
Die Led's sind über Jumper angeschlossen um sie evtl. auszuschalten
um den Stromverbrauch zu reduzieren.
Die LCD Anzeige ist nicht unbedingt
notwendig, dient in der Hauptsache dazu in der Entwicklungsphase aktuelle Parameter oder Zustände an zu zeigen.
Das Funkmodul ist
notwendig um mein Fahrzeug über Funk fern zu steuern.
Die Funktionen im einzelnen
- Taste 1 steuert alle Motoren vorwärts
- Taste 2 steuert den Linken Motor vor
- Taste 3 stoppt alle Motoren
- Taste 4 steuert den rechten Motor vor
- Taste 5 steuert beide Motoren zurück
- Taste 6 regelt die Geschwindigkeit aller Motoren runter
- Taste 7 regelt die Geschwindigkeit aller Motoren rauf
- Weiße Led leuchtet kurz auf wenn ein Funksignal abgegeben wird
- Orange Led blitz ständig kurz auf um den Betrieb der Fernsteuerung an zu zeigen.
- Blaue Led blitzt kurz wenn das ausgesandte Signal vom Empfänger erkannt und von diesen wieder zurück gesendet wird, so kann überprüft werden ob die Reichweite nicht überschritten ist.
- Grüne Led ist Optional für evtl. spätere Funktionen vorgesehen und aktuell außer Funktion
Die Sensor Platine gibt zwei separate Signale zwischen 0 bis 5 Volt an den Mikroprozessor ab. Der Mikroprozessor wandelt diese Analogen Werte in Digital Werte im Bereich 0 bis 1023 Bit um, und vergleicht diese Werte, je nach Differenz werden dann die Motoren gesteuert, außerdem werden die Werte mit einen festgelegten Minimalwert verglichen um so fest zu stellen ob das Fahrzeug zu dich auf einen Gegenstand aufgefahren ist, dann nämlich soll er stoppen und erst wieder weiter fahren wenn der Abstand sich vergrößert hat.
.