Nun gab es natürlich die Möglichkeit eine fertige Steuerung zu kaufen , aber wie meistens in solchen Fällen werden die Erwartungen nicht so ganz zufrieden gestellt, also beschloss ich selber eine Regelung zu erstellen.
Also beschloss ich mit dem Mikroprozessor "Atmega 8 " diese Aufgabe zu bewältigen, so das ich die Möglichkeit habe auch andere im Moment nicht vorgesehenen Lüfter später eventuell einmal anzuschließen und dann hoffentlich nur die Software ändern muss.
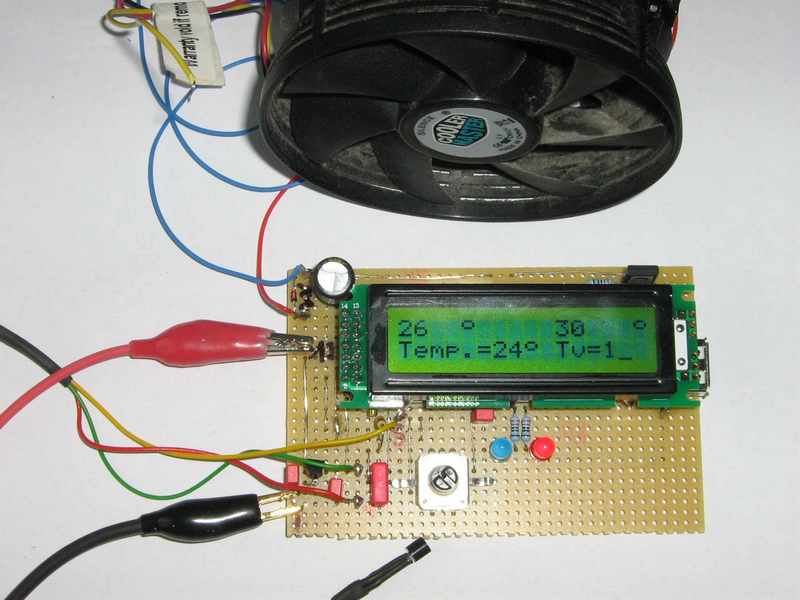
Die Regelung soll als Pulsweitenregelung ( PWR) entwickelt werden , die Sollwerte für die Hysterese also dann wann der Lüfter bei minimaler Temperatur anfangen soll zu regeln , bis zu dem Punkt wo er seine maximale Drehzahl abgibt sollen über einen Drehgeber eingegeben werden .
Die Temperaturerfassung geschieht mit einem IC2 Temperatur Fühler DS 1820.
Der Temperaturfühler arbeitet mit einer Genauigkeit von maximal 0,5°C, das reicht für eine Lüfterregelung allemal aus.
der außer der Drehfunktion auch noch eine tastende Eigenschaft beinhaltet indem man die Achse hereindrückt.
Ein Drehgeber ist nichts anderes als zwei um einen gewissen Winkelgrad versetzte Taster die durch die Rotation einer Achse abwechselnd betätigt werden.
Wenn der Mikroprozessor jetzt feststellt welcher der beiden Taster zuerst betätigt wird, weiß er auch in welcher Richtung gedreht wird,
und hat somit die Möglichkeit die Tastimpulse zu zählen und auszuwerten.
 ist angeschlossen an PIN 4
(Interrupt 0) und Pin 5 (Interrupt
1) zusätzlich hat der Drehgeber
ist angeschlossen an PIN 4
(Interrupt 0) und Pin 5 (Interrupt
1) zusätzlich hat der Drehgebernoch eine tastende Funktion ( S2) wenn man die Achse reindrückt.
arbeitet also seinen internen 1 MHz .
Dann benötigt er für eine Programmschleife wenn dort nur eine Led angeschaltet und beim nächsten Schleifendurchlauf wieder ausgeschaltet werden soll
in etwa 6us (Mikrosekunden), wenn in dieser Schleife noch ein Unterroutine aufgerufen werden soll, welches das Display aktualisiert so benötigt die
Programmschleife schon 5 ms (Millisekunden) vorausgesetzt das Display arbeitet im 4 Bit Modus.
Sollte jetzt das Display bei jedem Aufruf auch noch gelöscht werden so benötigt eine Programmschleife schon 12ms ( Millisekunden).
Hinzu kommt jetzt noch der benötigte Programm Code somit eine Schleife deutlich länger als 12 ms dauert.
Die Kontakte des Drehgeber schließen in Abhängigkeit der Drehgeschwindigkeit in etwa für 5ms bis ca. 120ms.
Es wird so also im ungünstigen Fall der Kontakt des Drehgebers geschlossen und auch wieder geöffnet sein bevor die Programmschleife zeitlich die Möglichkeit der Abfrage hat.
Es besteht jetzt die Möglichkeit das Display im 8 Bit Modus anzuschließen um so die Geschwindigkeitsverluste der Programmierschleife geringer zu halten ,
oder man benutzt eine höhere Taktfrequenz.
Beides kommt hier aber nicht zum tragen , weil das Display neu verlötet werden müsste, und die Frequenz erhöhen ginge zwar ist aber wegen Platzmangel auf der Platine schlecht auszuführen.
Also versuche ich den Drehgeber über Interrupts abzufragen.
Beim eintreten eines externen Interrupts beim Atmega 8, nur an zwei festgelegten Pins möglich ,wird das laufende Programm angehalten
und im Hardware Stack ( festgelegter Interner Speicher ) die Information abgelegt an welcher Stelle das laufende Programm unterbrochen wurde.
Dann wird in die sogenannte ISR ( Interrupt Service Routine ) gesprungen quasi ein kleines Unterprogramm und dieses abgearbeitet.
Danach wird das eigentliche Programm wieder an der zuvor im Stack Speicher gesicherten Adresse fortgesetzt.
Während diese Routine abläuft werden alle anderen Interrupts deaktiviert bis die Routine beendet ist.
Dadurch gehen aber evtl. auftretende Ereignisse am gleichen sowie an anderen Interrupt Eingängen nicht verloren sondern sie werden in einem sogenannten
Flag zwischen gespeichert,allerdings kann jeweils nur ein Ereignis pro Interrupt Eingang zwischen gepuffert werden .
Sollten mehrere auftreten ,können so einige verloren gehen deswegen sollte man diese Routine so klein wie möglich halten, damit im Bedarfsfall auch kein Interrupt vernachlässigt wird.
Ich beschränke mich hier auf die Anweisungen die direkt im Register gemacht werden , es ist vielleicht nicht immer die komfortabelste Möglichkeit
hat aber den Vorteil das diese Registeranweisungen alle im Atmel Datenblatt beschrieben sind und somit auch alle der Einstellmöglichkeiten bietet.
Die dafür zuständigen Register sind folgende:
| MCUCR Register | ||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| |
|
|
|
|
|
ISC11 oder ISC01 | ISC10 oder ISC00 | |
| |
|
|
|
|
|
0 | 0 | Interrupt 0 solange L Pegel anliegt |
| |
|
|
|
|
|
0 | 1 | Interrupt 0 wird ausgelöst bei wechsel von H nach L oder L nach H |
| |
|
|
|
|
|
1 | 0 |
Interrupt 0 bei wechsel von H nach L |
| |
|
|
|
|
|
1 | 1 | Interrupt 0 bei wechsel von L nach H |
| |
|
|
|
0 | 0 | |
|
Interrupt 1 solange L Pegel anliegt |
| |
|
|
|
0 | 1 | |
|
Interrupt 1 wird ausgelöst bei wechsel von H nach L oder L nach H |
| |
|
|
|
1 | 0 | |
|
Interrupt 1 bei wechsel von H nach L |
| |
|
|
|
1 | 1 | |
|
Interrupt 1 bei wechsel von L nach H |
| Im MCUCR Register wird festgelegt welcher Eingang bzw welcher Interrupt also 1 oder 0 benutzt werden soll, und auf welches Ereignis er reagieren soll, Als Pegel von Plus nach Minus oder Minus nach Plus usw. | ||||||||
| GICR Register | ||||||||
| |
|
|
|
|
|
ISC11 oder ISC01 | ISC10 oder ISC00 | |
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| |
|
|
|
|
|
|
|
|
| 1 | |
|
|
|
|
|
|
Interrupt 1 freigeben |
| |
1 | |
|
|
|
|
|
Interrupt 0 freigeben |
| Eine 1 im Bit 6 wäre notwendig um den Interrupt 0 zu aktivieren dementsprechend eine 0 um ihn zu deaktivieren. | ||||||||
| SREG Register | ||||||||
| |
|
|
|
|
|
|
|
|
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| 1 | |
|
|
|
|
|
|
Freigab der Interrupts Global |
| Mit Bit 7 werden alle Interrupts generell gesperrt oder frei gegeben. | ||||||||
| GIFR Register | ||||||||
| INTF1 | INTF0 | |
|
|
|
|
|
|
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| INTF1 | INTF0 | |
|
|
|
|
|
|
| |
1 | |
|
|
|
|
|
|
| Bit 6 (INTF0) wird auf 1 gesetzt wenn ein Ereignis am Interrupt 0 Eingang statt gefunden hat und erst dann wieder auf Null gesetzt wenn die Interrupt Routine beendet wurde. | ||||||||
Nun geht es also erst einmal darum diese mehrfach Zählung zu unterdrücken.
Bei einem Interruptvorgang an Pin 4 also INT0 wird in die (ISR) Interrupt Sub Routine gesprungen und dort eine Led eingeschaltet die sich nach 10 Millisekunden
wieder ausschaltet.
Sollte innerhalb dieser Sekunde ein weiterer Interrupt ausgelöst werden, geht dieser nicht etwa verloren , sondern wird zwischengespeichert,
und erst wenn die laufende Interrupt Sub Routine Routine beendet ist, wird ein weiteres mal diese Routine aufgerufen.
Damit ist sichergestellt das auf keinen Fall ein Interrupt Ereignis verloren geht.
Das hat natürlich auch den Nachteil das wenn ein Taster prellt, also kurz mehrfache Impulse abgibt, diese auch alle gezählt werden,
abhängig davon wie schnell man den Drehgeber dreht, oder auch wie seine Mechanische Beschaffenheit ist.
Wichtig
Zum auswerten diese Sensor genügt ein Digitaler Eingang des Mikroprozessors.
Der Sensor hat einmal die Betriebsspannung von 5 Volt , Masse an Pin1 und +5V an Pin 3, und den Digitalen Ausgang an Pin 2.
 Der Mikroprozessor
Eingang für die Temperaturerfassung kann individuell
ausgewählt werden , hier der Pin 14 (Pin B0).
Der Mikroprozessor
Eingang für die Temperaturerfassung kann individuell
ausgewählt werden , hier der Pin 14 (Pin B0).Der Sensor gibt in Abhängigkeit der aktuell erfassten Temperatur ein Digitales Signal ab.
Datenblatt : DS1820
Mit einer Auflösung von 9 Bit das 0,5 ° C Schritte zulässt.
Wichtig ist beim Anschluss das ein 4,7 K Widerstand nach Plus notwendig ist.
1. Plus
2. Masse
3. Datenleitung
, es gibt aber auch Typen die nur zwei Anschlüsse aufweisen nämlich
1. Masse
2. Datenleitung
bei diesen Typen holt sich der Sensor ( I-Button , oder 1Wire Device) seine Positive Betriebsspannung über die Datenleitung,
die weil sie über einen Widerstand zu Positiven Spannungsversorgung verfügt den im Sensor enthaltenen Kondensator in den Datenpausen mit Spannung auflädt.
(Siehe Sinnbild unten.)
| Problem |
Mögliche
Ursache |
| Im Display werden immer nur Null Grad angezeigt |
|
| Piepsen wenn Lüfter
langsam dreht |
|
| Temperaturanzeige
springt |
|
 an
Pin
2 Temperatursensor liegen. Abhilfe schafft
meist ein ca. 100
Nf Kondensator, möglichst nahe an die
Versorgungsspannung des Sensors
anzuschließen.
an
Pin
2 Temperatursensor liegen. Abhilfe schafft
meist ein ca. 100
Nf Kondensator, möglichst nahe an die
Versorgungsspannung des Sensors
anzuschließen.| Programmcode
in Blau |
Beschreibung |
| $regfile "m8def.dat"
|
Definiert den Atmega als Atmega8 |
| $crystal = 1000000 | Gibt die Quarzfrequenz an in Herz |
| $hwstack =
64 |
Default use 32 Hardware reservierte Speicher |
| $swstack = 50 |
Default Software resvierung Speicher |
| Config Lcd = 16 * 2 | Display Größe definieren |
| Config Lcdpin = Pin ,
Db4 = Portb.5 , Db5 = Portb.4 , Db6 = Portb.3 , _ Db7 = Portb.2 , Rs = Portd.1 , E = Portd.0 |
Display Anschlüsse definieren |
| Config 1wire =
Portc.5 |
Schnitstelle Festlegen Für Temp Sensor |
| Dim Ds1820 As
Integer |
Integer Variabel für Ds1820 setzen kann Daten - 32768 bis+32768 aufnehmen |
| Dim T_wert As Byte | |
| Textzeichen erstellen |
|
| Deflcdchar 1 , 14 ,
17 , 17 , 14 , 32 , 32 , 32 ,
32 |
Zeichen für Grad °° |
| Cls | |
| I/O |
|
| Ddrd.5 = 1 |
Als Ausgang setzen Led Blau |
| Ddrd.6 = 1 | Als Ausgang setzen Led Rot |
| Ddrd.2 = 0 | Als Eingang setzen Interrupt 0 |
| Ddrd.3 = 0 | Als Eingang setzen Interrupt 1 |
| Ddrd.4 =
0 |
Als Eingang setzen Drehgeber Taster |
| Ddrc.3 = 1 |
Als Ausgang setzen für Summer |
| Portd.2 = 1 | PullUp setzen für Portd.2 |
| Portd.3 = 1 |
PullUp setzen für Portd.3 |
| Portd.4 = 1 | Pull Up setzen für Taster am drehgeber |
| Config Portb.1 = Output | |
| Variable |
|
| Dim Drehwert As Byte | |
| Dim Temp_min As Byte | Speicher für Sollwert der minimale Temperatur |
| Dim Temp_min_eprom As Eram Byte | Epromspeicher für
Sollwert min Temperatur |
| Dim Temp_max As Byte | |
| Dim Temp_max_eprom As Eram Byte | |
| Dim A As
Byte |
Für Störungsanzeige schleife für Led Blinker |
| Dim Temperatur_differenz As Word | |
| Dim Bit_grad As Byte | |
| Dim B As Byte | für schrittweite beim erhöhenn und verringen des tastverhältnis |
| Dim Aus As Byte | |
| Dim Stufe As Byte | |
| Dim Sektor As Byte | |
| Dim Temperatur As Byte | |
| Dim C As Byte | |
| Dim Tastverhaeltnis As Byte | |
| Timer 1 Konfiguration |
|
| Tccr1a = &B10000001 | |
| Tccr1b = &B00000001 | voller Takt wird genutzt |
| On Int0 Kanal0 | |
| On Int1 Kanal1 | |
| Mcucr =
&B00001010 |
beide Interrupt 's reagieren auf Wechsel von H nach L |
| Gicr =
&B11000000 |
INT1 + INT0 freigeben |
| Sreg =
&B10000000
|
Global Interrupt freigeben |
| Temp_min = Temp_min_eprom | holt die
gespeicherten sollwert vorgabe aus dem Eprom und
kopiert ' sie in ramspeiche |
| Waitms 20 | |
| Temp_max = Temp_max_eprom | |
| Waitms 20 | |
| Cls | |
| Locate 1 , 1 | |
| Lcd "Drehgeber" | |
| Locate 2 , 1 | |
| Lcd "Version 1N" | |
| Wait 3 | |
| Cls | |
|
Vorgabewerte
|
|
| Temperatur = 10 | |
| If Pind.4 = 0 Then Gosub Sollwert Else Goto Hauptprogramm | Wenn Taster beim
einschalten gedrückt dann ins Menü wechseln wenn Taster nicht gedrückt dann ins Hauptprogramm springen |
|
H a u p t p r
o g r a m m
|
|
| Deflcdchar ?,14,17,17,14,32,32,32,32' replace ? with number (0-7) | |
| Lcd "Fan Speed" | |
| Portd.5 = 1 | Ventilator mit Voller Drehzahl anlaufen lassen im Startmoment |
| Tastverhaeltnis = 250 | |
| Compare1a = Tastverhaeltnis | |
| Wait 2 | |
| Portd.5 = 0 | |
| Do | |
| Compare1a = Tastverhaeltnis | |
| Waitms 10 | |
| Temperatur = Ds1820 | |
| Toggle Portd.6 | |
| Cls | |
| Locate 1 , 1 | |
| Lcd Temp_min | |
| Locate 1 , 5 | |
| Lcd Chr(1) | |
| Locate 1 , 11 | |
| Lcd Temp_max | |
| Locate 1 , 16 | |
| Lcd Chr(1) | |
| Locate 2 , 1 | |
| Lcd "Temp.=" ; Ds1820 ; Chr(1) | |
| Locate 2 , 11 | |
| Lcd "Tv=" ; Tastverhaeltnis | |
| Temperatur Sensor abfragen | |
| 1wreset | Der Bus wird resetiert |
|
1wwrite
&HCC |
Übersprimge Rom weil nur ein sensor angeschlossen |
|
1wwrite &H44 |
Starte Temperaturmessung |
|
Waitms 600 |
Pause von 600 Millisekunden
' wenn pause zu kurz gibts falsche Temperaturwerte
aber nur beim einschalten z.B 85° |
|
1wreset |
Reset DS1820 |
| 1wwrite &HCC | Überspringe Rom |
|
1wwrite &HBE |
sende inhalt der register AAH und 00h |
| Waitms 10 | |
|
Ds1820 = 1wread(1) |
lese die empfangenen Daten |
| Waitms 10 | |
|
1wreset |
Reset Ds1820 |
|
Shift Ds1820 , Right |
entferne letztes bit |
|
Ende Temp Sensor Abfrage |
|
| Temperatur_differenz = Temperatur - Temp_min | |
If Temperatur_differenz < 1 Then Tastverhaeltnis = 1 |
|
| If Temperatur_differenz > 0 Then Tastverhaeltnis = 2 | |
| If Temperatur_differenz > 1 Then Tastverhaeltnis = 4 | |
| If Temperatur_differenz > 2 Then Tastverhaeltnis = 5 | |
| If Temperatur_differenz > 3 Then Tastverhaeltnis = 10 | |
If Temperatur_differenz > 4 Then Tastverhaeltnis = 20 |
|
If Temperatur_differenz > 5 Then Tastverhaeltnis = 50 |
|
If Temperatur_differenz > 6 Then Tastverhaeltnis = 240 |
|
| If Temperatur_differenz > 100 Then Tastverhaeltnis = 1 negativer wert | |
| If Tastverhaeltnis > 253 Then Tastverhaeltnis = 254 | |
| If Tastverhaeltnis < 2 Then Tastverhaeltnis = 1 | |
| If Ds1820 > Temp_max And Tastverhaeltnis > 230 Then Gosub Stoerung | |
| Loop | |
| Return | |
| Störungsanzeige bei Übertemperatur ausgeben | |
| Stoerung: | |
| For A = 1 To 3 | Blaue Led soll aufblitzen und Meldung auf Display ausgeben + summer |
| Portc.3 = 1 |
Summer an |
| Waitms 500 | Led Blau an |
| Portd.5 = 1 |
Pause |
| Waitms 20 |
|
| Portd.5 = 0 |
|
| Portc.3 = 0 |
Summer aus' Led Blau aus |
| Waitms 100 | |
| Next A | |
| Cls |
Display löschen |
| Locate 1 , 1 | |
| Lcd " Uebertemperatur" | |
| Locate 2 , 1 | |
| Lcd " ! ! ! ! ! ! ! ! " | |
| Waitms 999 | |
| Return | |
| Interrupt 0 | |
| Kanal0: | |
| If Pind.2 = 0 And Pind.3 = 1 Then
Drehwert = Drehwert -1 |
|
| Portd.6 = 1 |
Led grün an |
| Waitms 20 | |
| Portd.6 = 0 | |
| Return | |
| Interrupt 1 | |
| Kanal1: | für rechtsdrehung |
| If Pind.3 = 0 And Pind.2 = 1 Then Drehwert = Drehwert + 1 | |
| Portb.0 = 1 | Led Orange an |
| Waitms 20 | |
| Portb.0 = 0 | |
| Return | |
| Sollwerte eingeben | |
| Sollwert: | |
| Cls | |
| Locate 1 , 1 | |
| Lcd "Sollwerte eingeben" | |
| Wait 2 | |
| Do | |
| Cls | |
| Temp_min =
Drehwert |
Wert vom Drehgeber in Variable |
| Temp_unten kopieren | |
| Locate 1 , 1 | |
| Lcd "unter Temp." | |
| Locate 2 , 1 | |
| Lcd Drehwert ; Chr(1) | |
| Waitms 30 | |
| If Pind.4 = 0 Then Waitms 5 | |
| If Pind.4 = 0 Then Exit
Do |
Schleife verlassen bei Tastendruck |
| Loop | |
| Daten sichern | |
Temp_min_eprom = Drehwert |
kopiert min. Temperatur vorgabe im |
| eprom | |
| Waitms 20 | |
| Portb.0 = 1 | |
| Waitms 200 | |
| Portb.0 = 0 | |
| Sollwert Temperatur maximum | |
| Cls | |
| Locate 1 , 1 | |
| Lcd "Sollwerte eingeben" | |
| Wait 2 | |
| Do | |
| Cls | |
| Temp_max = Drehwert | |
| Locate 1 , 1 | |
| Lcd "obere Temp." | |
| Locate 2 , 1 | |
| Lcd Drehwert ; Chr(1) | |
| Waitms 30 | |
| If Pind.4 = 0 Then Waitms 5 | |
| If Pind.4 = 0 Then Exit Do | |
| Loop | |
| Daten sichern | |
| Temp_max_eprom =
Drehwert |
kopiert temp.max vorgabe im |
| eprom | |
| Waitms 20 | |
| Portb.0 = 1 | |
| Waitms 200 | |
| Portb.0 = 0 | |
| E N D E | |